다중센서 융합을 통한 전투차량의 위치추정 성능 개선에 관한 연구
A Study on the Performance Improvement of Position Estimation using the Multi-Sensor Fusion in a Combat Vehicle
Article information
Trans Abstract
Purpose
The purpose of this study was to propose a sensor fusion algorithm that integrates vehicle motion sensor(VMS) into the hybrid navigation system.
Methods
How to evaluate the navigation performance was comparison test with the hybrid navigation system and the sensor fusion method.
Results
The results of this study are as follows. It was found that the effects of the sensor fusion method and α value estimation were significant. Applying these greatly improves the navigation performance.
Conclusion
For improving the reliability of navigation system, the sensor fusion method shows that the proposed method improves the navigation performance in a combat vehicle.
1. 서 론
최근 전투차량에는 자세를 계산하기 위해 관성항법장치(INS, Inertial Navigation System)를 장착하고 있다[1]. INS는 관성센서인 자이로와 가속도계의 정보를 이용하여 동체의 위치, 속도, 자세 데이터를 제공하는 장치로서 정확한 정보를 제공함에 따라 개활지뿐 아니라 경사지에서 탄의 명중률을 향상시킬 수 있다. 또한 INS는 동적 특성이 우수하고 주위 환경에 의한 영향이 적어 다양한 무기체계의 기본적인 항법시스템으로 이용되고 있다[2]. 그러나 장시간 사용하는 경우 적분 연산에 의한 항법 계산과정에서 관성센서 오차가 누적되어 동작시간에 따라 수평위치오차(horizontal position error)와 고도오차(vertical error)가 증가하는 문제가 있다[3]. 이러한 INS의 단점을 보완하기 위해 전투차량의 항법 기술은 위성항법시스템(GNSS, Global Navigation Satellite System)인 GPS(Global Positioning System) 등과 같은 보조 센서를 사용하여 위치를 보정하는 복합항법을 구성하는 것이 일반적이다[4]. 또한 영속도 보정(ZUPT, zero-velocity update)을 통해 항법 오차를 보상하는 방법을 사용하고 있다. 전투차량에 적용된 INS는 위 두 가지 방법을 모두 적용하고 있으므로 항법 누적오차에 따른 영향은 미미하다고 할 수 있다[1].
하지만 차량을 사용하는 환경에는 건물이나 터널 등 위성 신호를 방해하는 구조물이 존재하므로 GPS만으로는 정확한 위치 정보를 보정하는 데 어려움이 있다. 따라서 이를 보완하기 위해 2가지 이상의 센서를 결합하는 센서융합(Sensor fusion) 기술을 통해 항법 누적오차를 보상하고 전투 환경의 제약조건을 극복하기 위한 연구가 지속적으로 진행되고 있다[5,6]. 본 논문은 전투차량에 활용되고 있는 복합항법 시스템(INS/GPS)에 변속기 내부에 장착되어 있는 차량 모션 센서(VMS, Vehicle Motion Sensor)를 추가적으로 융합하여 전투차량의 위치추정을 보다 정확하게 추정하는 방법을 제안한다. 이를 위해서 칼만 필터(KF, Kalman filter)를 활용한 다중센서 융합 알고리즘을 도입한다. 이 방법의 사용 가능 여부를 판단하기 위해 본 논문에서는 센서 융합 시 제반되는 주요 오차요소들의 영향성을 검토하는 운용적합성 시험을 진행하였다.
본 논문의 구성은 다음과 같다. 제 2장은 복합항법 시스템의 구성과 기능, 비정렬 오차 보정 방법에 대하여 소개하고, 제 3장에서는 복합항법 시스템의 성능시험 결과에 대해 서술한다. 제 4장은 위치오차 증가에 대한 원인을 검토하며 제 5장은 칼만 필터를 이용한 VMS 센서융합 알고리즘에 대해 기술한다. 제 6장은 제 5장에서 제안한 센서융합과 복합항법의 성능을 비교한다. 마지막으로 제 7장에서 본 논문의 결론을 맺는다.
2. 시스템 구성 및 비정렬 오차 보정
2.1. 복합항법 시스템 구성 및 기능
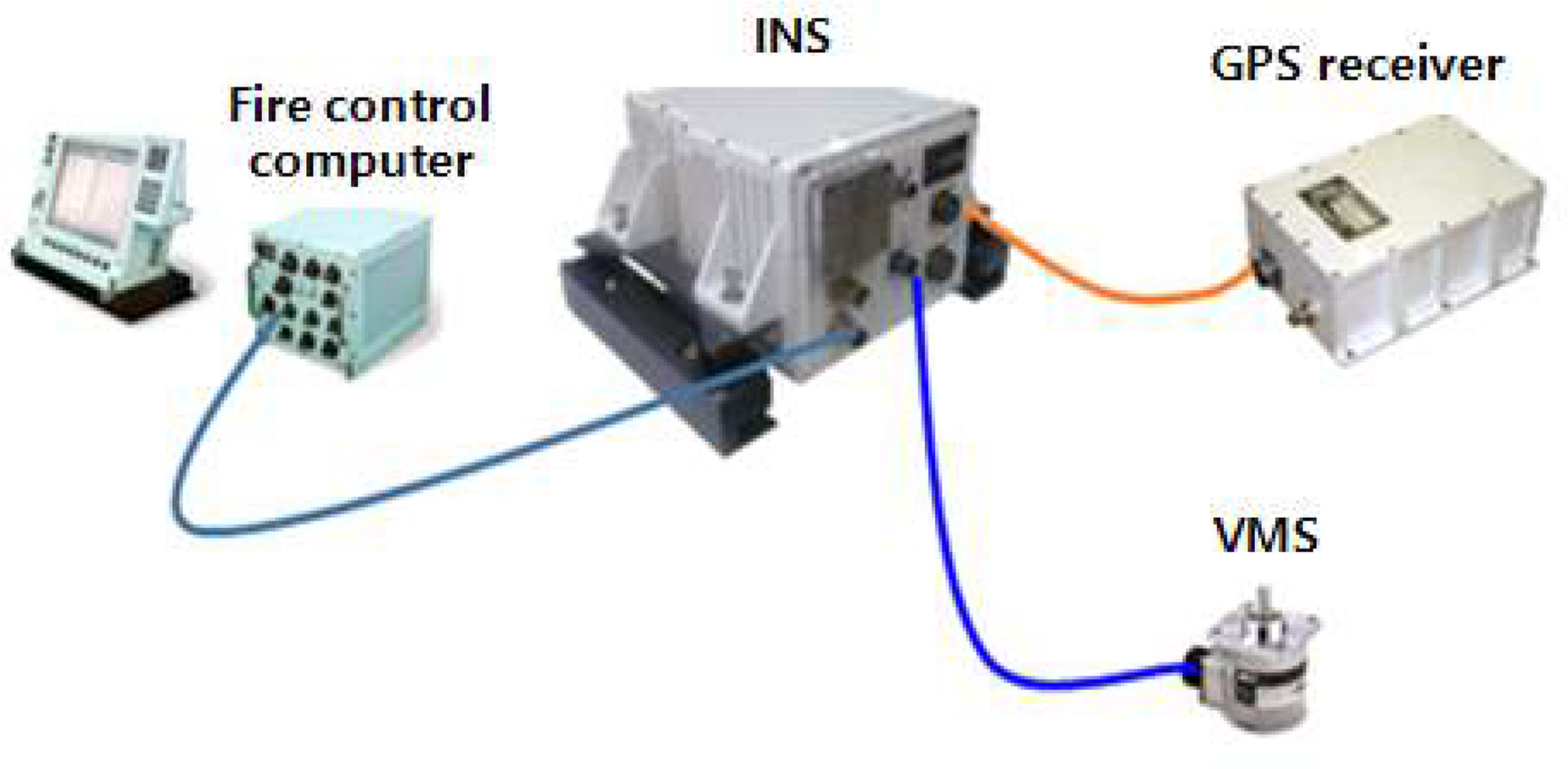
전투차량의 복합항법 시스템은 INS와 보조 센서인 위성항법시스템(GPS 수신기, GPS 안테나)으로 구성되어 있다. Fig. 1은 전투차량에서 INS와 위성항법시스템이 장착된 위치와 형상을 나타낸다. INS는 현재 위치에서 다른 위치로 이동하는 차량의 속도, 위치, 자세와 같은 거동에 관한 정보를 제공하는 장치로서 자이로, 가속도계, 컴퓨터장치로 구성되어 있다. 자이로와 가속도계는 3차원 공간정보를 표현하기 위해 기본적으로 3개씩 내장되어 있다. 자이로는 각속도를 측정하는 센서로서 기준 좌표를 설정하여 차량의 진행방향을 계측하고, 가속도계는 진행방향으로의 가속도를 감지한다. 내장되어 있는 컴퓨터장치는 자이로와 가속도계에서 측정한 각속도 및 가속도뿐만 아니라 속도계, 고도계 등 주변장치로부터 받은 정보를 종합하여 차량의 전후·좌우·상하 3축에 대한 위치 변위값을 계산한다. INS는 초기 위치가 주어지면 지형, 기상에 영향을 받지 않고 동체의 위치를 결정할 수 있는 특성을 지니고 있어 무기체계센서로는 유용한 장점을 가지고 있다. 하지만 적분 연산에 의한 오차가 누적되면서 최종적으로 계산된 값이 드리프트(drift)되는 현상이 생긴다. 이러한 누적오차를 보상하기 위해 GPS를 보조센서로 사용하는 복합항법 시스템을 적용하고 있다.

Position of the hybrid navigation system on combat vehicle
2.2. INS 비정렬 오차 보정
INS는 항법 모드로 진입하기 전 기준 좌표계(reference frame)를 센서 좌표계(INS frame)로 설정하고, 센서 좌표계를 Fig. 2와 같이 하우징 좌표계(body frame)로 일치시키는 초기정렬 과정을 거치게 된다[7]. 여기서 미소각(bϕ, bθ, bψ)만큼 틀어진 좌표계를 하우징 좌표계 또는 플랫폼 좌표계(platform frame)라 한다. 정렬과정에서 차량의 초기자세는 INS를 이용해 결정되는데 INS는 측정 잡음요소를 포함한 각도를 측정하므로 미소각만큼 틀어지게 된다[8]. 이와 같은 차량의 자세오차는 주로 INS 내부의 센서오차에 의해 결정되며, 두 플랫폼 간 비정렬(misalignment) 오차 보정을 통해 정확한 차량의 자세값을 계산할 수 있다[1].
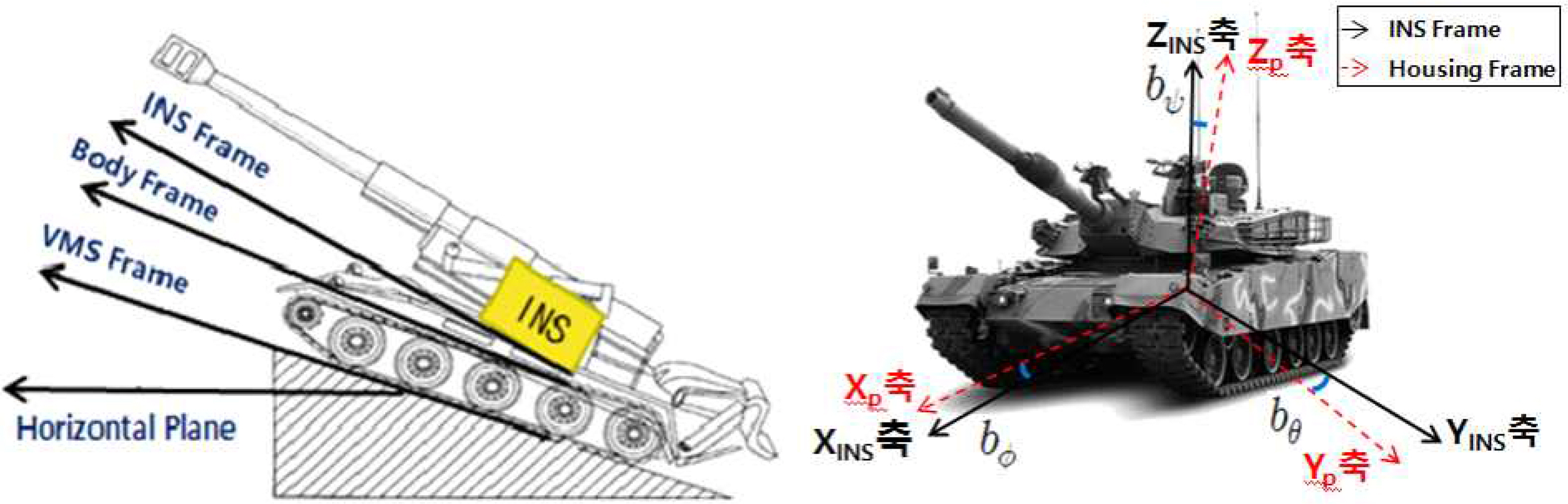
Frames of combat vehicle and Correction of INS misalignment
좌우경사각(이하 ‘roll’)과 전후경사각(이하 ‘pitch’)의 비정렬 오차를 측정하기 위해서는 전투차량을 평지에 주차한 후 주포에 사수상한의를 설치하여 roll과 pitch를 측정한다. 이후 INS에서 출력한 자세값을 비교하여 정렬 필요각(사수상한의 값 - INS 출력값)을 보상한다. 차량의 방위각(이하 ‘yaw’)은 Fig. 3과 같이 전투차량을 측지점 #1에 임의의 방향으로 주차한 후 포탑방위각을 0°로 위치시키고 정해진 측지점 #2를 지향하여 포탑방위각을 확인한다. 아래의 식 (1)로 계산된 θYaw값과 INS를 통해 출력된 yaw 값의 차이를 보상한다. 여기서 θYaw는 전투차량의 차량방위각을, ∆E는 측지점 #1과 #2의 동거차, ∆N은 측지점 #1과 #2의 북거차를 의미한다. 그리고 θt는 주포를 측지점 #2를 지향했을 때 포탑방위각을 의미한다.

Measurement of Yaw value
3. 복합항법 시스템 성능분석 결과
항법 요구성능을 평가하기 위해 전투체계에 복합항법 시스템을 탑재하여 운용적합성 시험을 수행한다. 시제품은 국방규격(KDS 2350-4003)에 따라 1대를 제작하고 Fig. 1과 같이 전투차량에 INS와 GPS를 각각 장착하여 항법 정확도에 대한 성능을 확인한다. 여기서 INS의 성능은 시스템의 초기정렬 정확도에 따라 결정되므로 성능 시험 전 비정렬 오차 보정을 수행한다.
시험은 Table 1, 2와 같이 총 10가지 항목을 수행하였다. 여기서 Table 1은 INS와 보조센서인 GPS의 연동·미연동성을 고려한 시험이며 Table 2는 특수한 전장 환경에서 전투차량의 자율기동을 통한 항법성능을 고려한 시험이다. 운용적합성 시험결과는 GPS 연동시험 등 8가지 항목에서 규격요구조건을 충족하였다. 하지만 GPS 연동 후 단절시험과 후진주행시험에서 수평위치오차와 고도오차 값이 각각 0.66%DT, 0.56%DT로 규격요구조건을 충족하지 못했다. Table 1에서 CEP50, PE50, DT(distance travel; 주행거리)는 항법시스템의 측정 신뢰도를 표현하기 위해 사용된다[9]. 여기서 밑 첨자 50은 명중확률을 의미한다. 관성센서의 출력은 무작위(Random) 상태로 존재하며 그 결과는 랜덤 형식에 기인한 통계적 기법을 통해 출력한다. 따라서 고도오차의 성능은 CEP(Circular Error Probability)와 PE(Probable Error)를 기준으로 평가되며 CEP50, PE50는 시험 샘플(Sample)에 대한 오차의 분산정도를 의미한다.
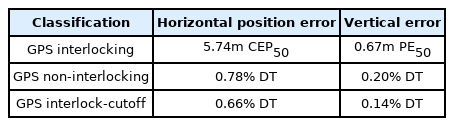
Results of navigation performance(combat vehicle test #1)
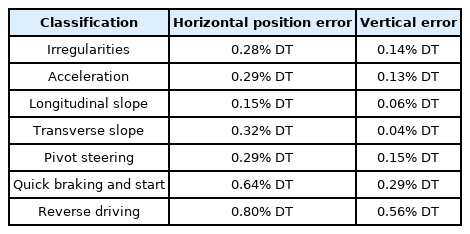
Results of navigation performance(combat vehicle test #2)
4. 항법성능에 미치는 인자 분석
4.1. GPS 연동 후 단절시험
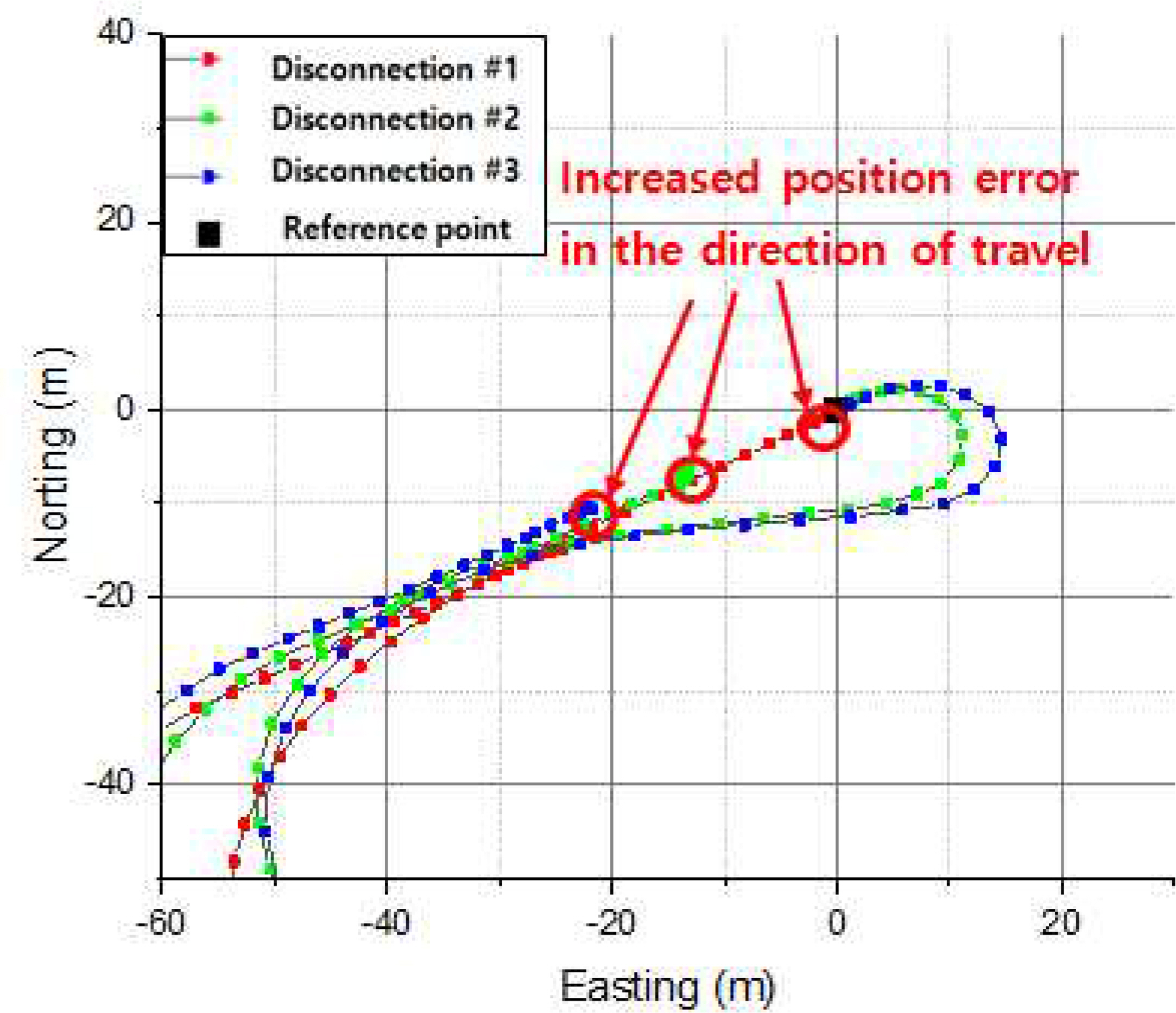
GPS 연동 후 단절시험은 GPS의 사용 불가 또는 비정상 작동으로 인해 수신 상태가 불량할 경우 INS 단독으로 차량의 위치, 속도 및 자세 정보를 제공할 수 있는지를 평가하는 시험이다. 시험 기준점에 정차된 차량은 GPS와 연동된 상태이며 출발과 동시에 GPS를 단절시킨다. INS 단독모드에서 차량을 약 2.5km 주행한 후 기준점에 복귀하여 항법 결과를 기록한다. 이후 초기 INS의 자세값과 두 항법 정보를 비교한다. 시험은 총 3회 반복시험을 수행하였으며 시험결과 진행방향에 대한 수평위치오차가 지속적으로 누적되고 있음을 확인하였다. 총 3회 반복시험을 진행하는 동안 오차값이 누적됨으로써 Fig. 4와 같이 전투차량의 초기 위치가 남서방향으로 변경되고 있음을 확인할 수 있다. 따라서 차량의 진행방향에 대한 수평위치오차 보정을 고려하여 Fig. 5의
Vertical error in the GPS interlock-cutoff test
Non-holonomic constraints
4.2. 후진주행 시험
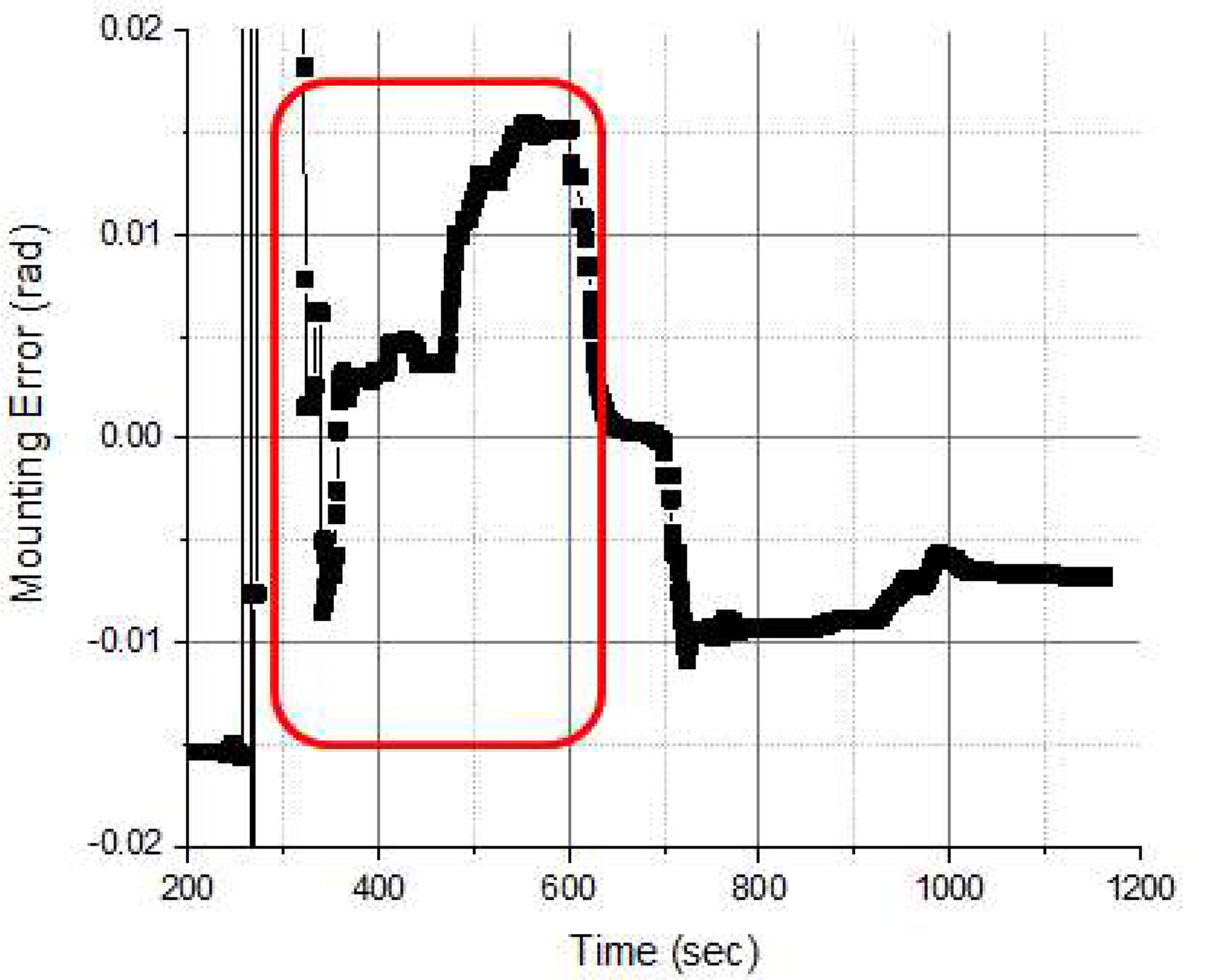
후진주행 시험은 180° 포탑을 회전한 상태에서 항법 성능을 평가하는 시험이다. GPS 연동모드에서 전방을 주시한 상태로 차량을 약 2.5km 이상 주행한다. 이후 포구를 180° 회전시킨 상태로 약 1.0km 이상 주행 후 시험 기준점에 복귀한다. 시험은 총 3회 이상 반복시험을 수행하고 초기 INS 자세값과 주행 후 차량의 항법 결과를 비교한다. 고도오차는 Fig. 6의 후진 #1~3, #5와 같이 시간에 따른 오차 누적 경향을 보여야 한다. 하지만 후진 #4의 경우 차량의 고도오차가 급격히 증가 후 감소하는 경향을 보이고 있다. 고도오차에 가장 큰 영향을 미치는 것은 INS와 차량 하우징 간 비정렬 오차이므로[8] 후진 #4의 비정렬 오차값을 분석해 보았다. 후진 #4의 비정렬 오차는 Fig.7과 같고 후진 #4의 고도오차와 유사한 경향을 보임을 알 수 있다.
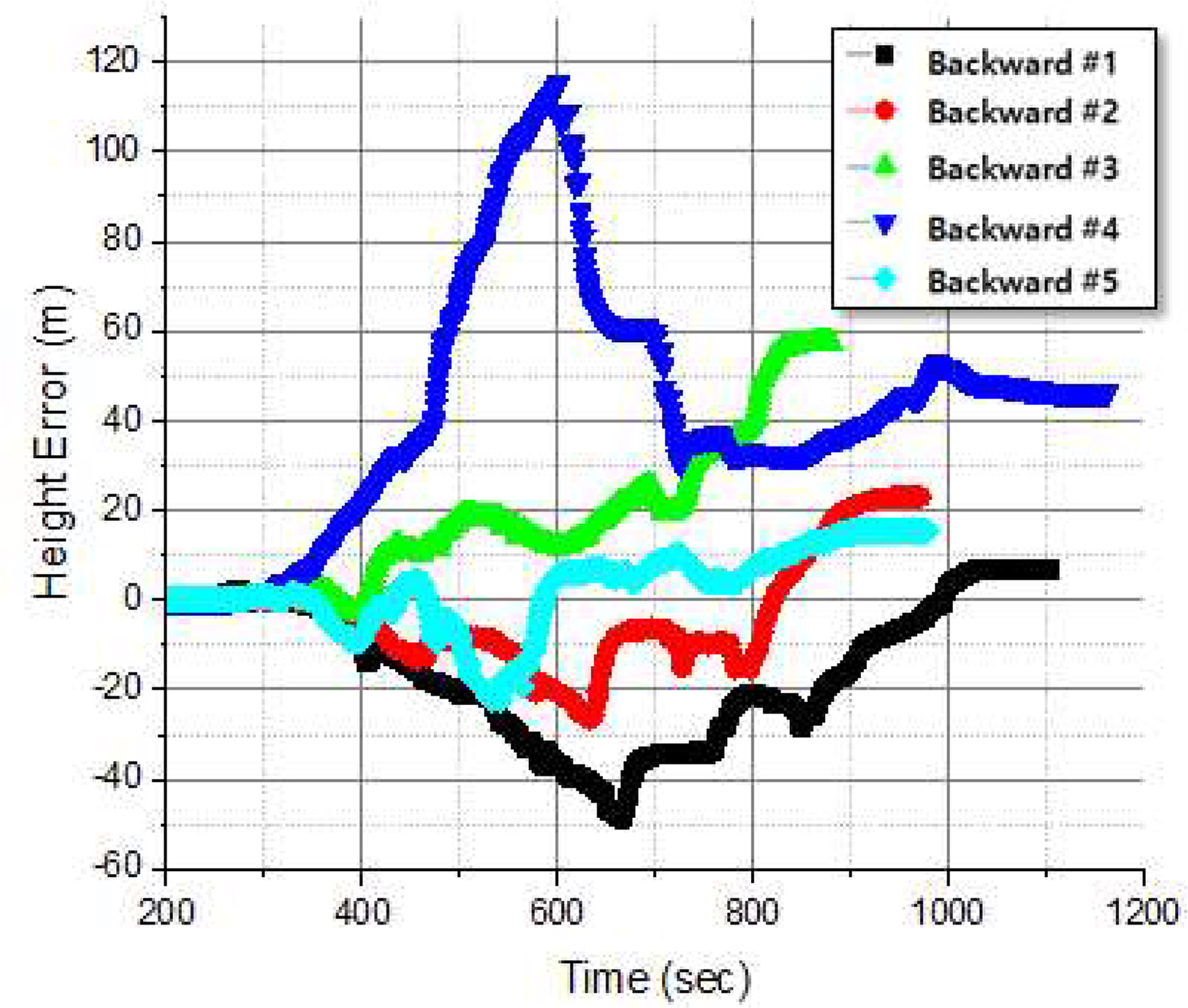
Vertical error in the backward driving test.
따라서 INS의 비정렬 오차가 왜곡됨에 따라 차량의 고도오차가 비정상적 경향을 보이고 있음을 알 수 있다. 이러한 비정렬 오차를 감소시키기 위해 INS 비정렬 오차 보정을 수행해야 한다. INS 비정렬 오차 보정은 Fig. 2와 같이 하우징 프레임과 INS 프레임을 일치시키는 초기 작업임을 앞서 언급하였다. 하지만 INS 정렬을 완료한 후에도 각종 시스템 오차 및 센서 특성에 따라 특별한 결함 없이도 비정렬 오차는 존재하며[6] 차량 동특성에 따른 pitch각의 변화가 Fig. 8과 같이 존재한다. 비정렬 오차값을 구하기 위해서는 하우징 프레임과 VMS 프레임이 동일하다는 가정을 만족해야 하나 주행 시 발생되는 pitch값의 변화를 통해 두 프레임 간 불일치되는 구간이 발생하게 된다. 실제 Fig. 9와 같이 두 프레임 간 α값이 존재하며 여기서 α값은 하우징 좌표계와 VMS 좌표계 간 비정렬 오차 값을 의미한다. Fig. 9의 그래프는 동적 상황에 따라 추정값이 가변적으로 나타나는 것으로 보이며 이러한 문제점은 칼만필터 공분산이 수렴하기 전이기 때문이다. Fig. 7의 그래프 동향과 같이 600초 이전의 데이터는 비정렬 보정을 수행한 후 전투차량이 주행하는 상황으로 칼만 필터의 상태벡터가 충분히 수렴하지 않고 발생된 오차가 비정렬 오차에 영향을 받아 발생된다. 600초에서 700초 사이에서는 전투차량이 영속도 보정을 수행하게 되며 칼만 필터의 상태벡터가 수렴되면서 이후의 데이터는 비정렬 오차에 미치는 영향이 감소함을 알 수 있다.
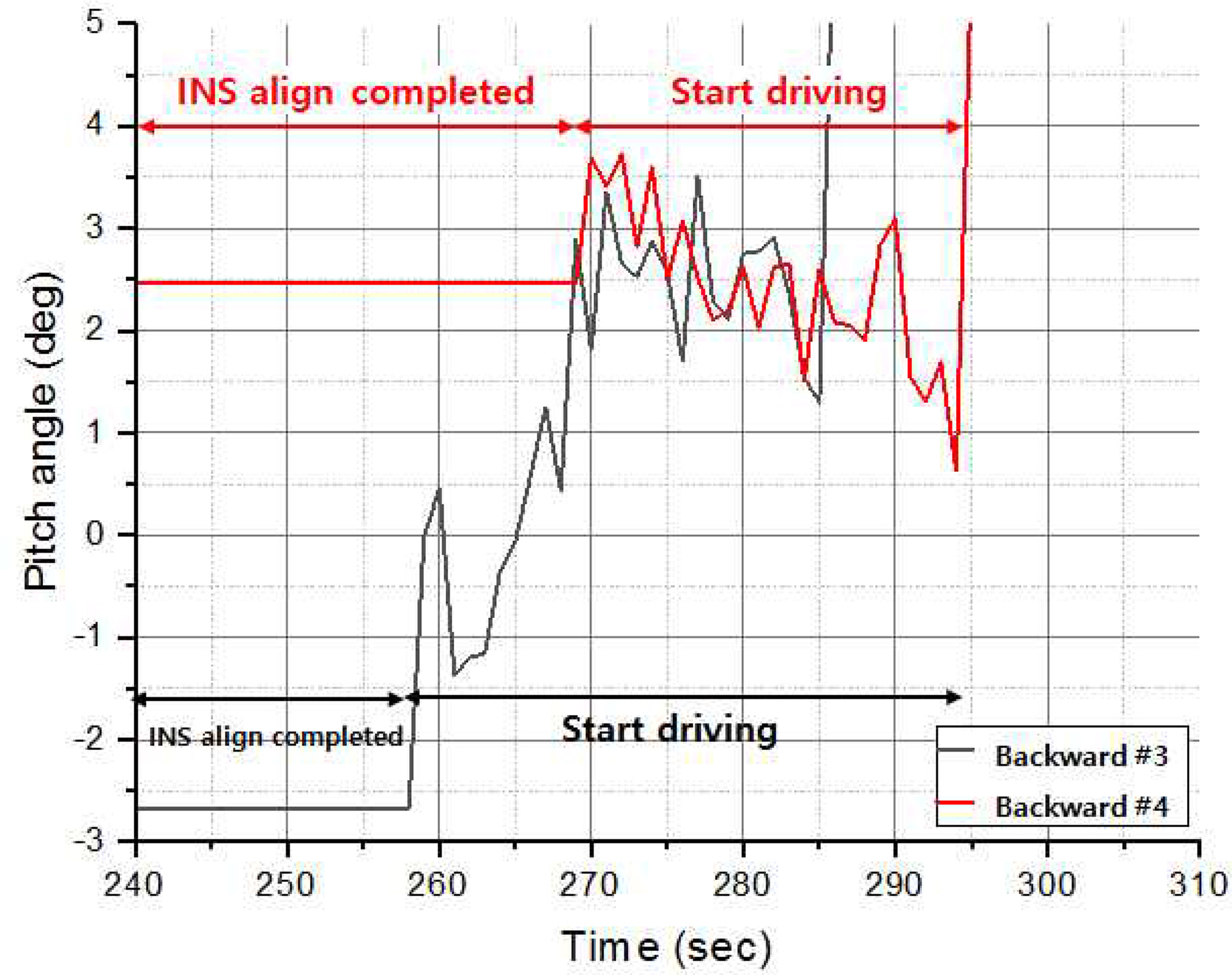
Change of the pitch angle
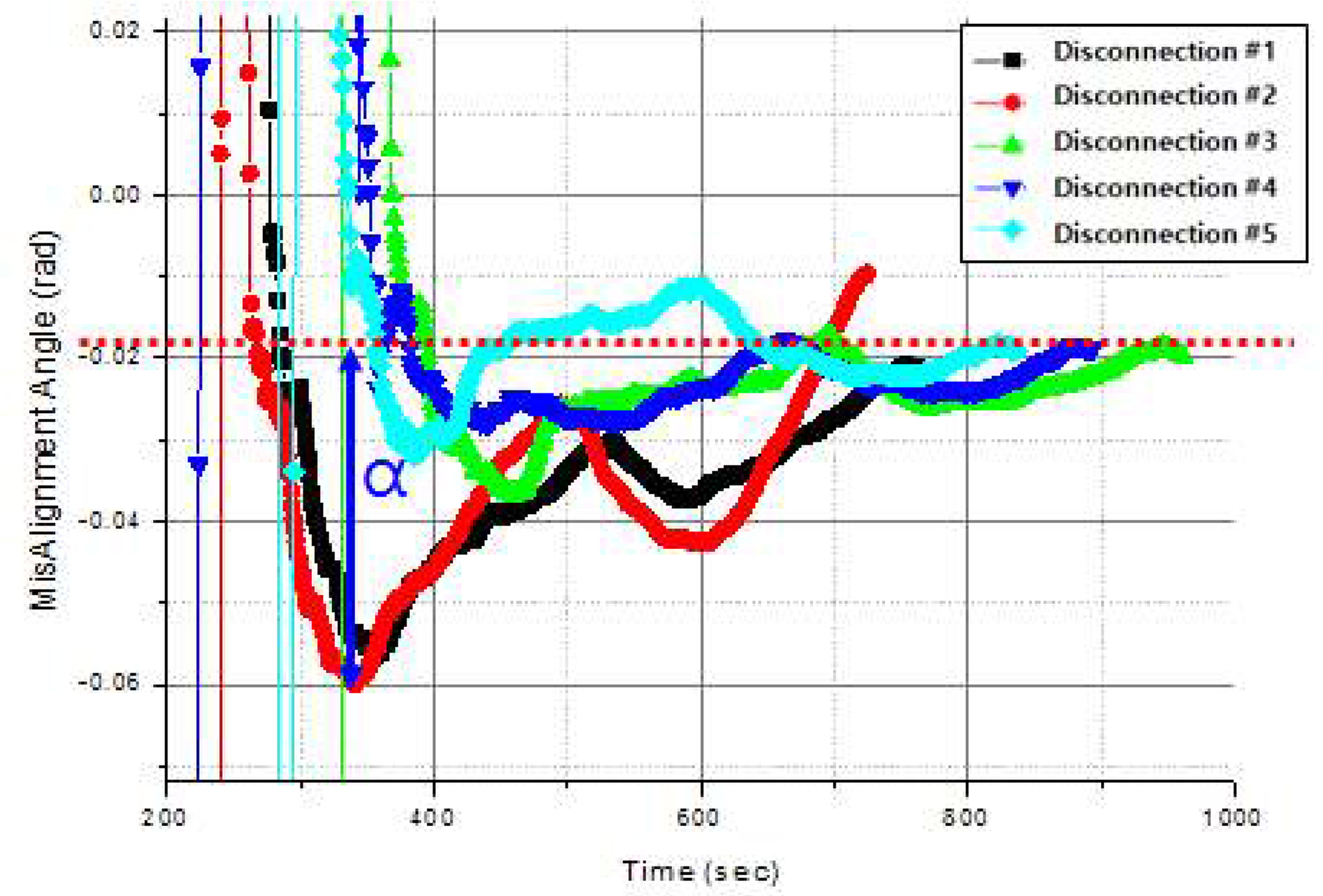
α value according to dynamic property.
Estimate of Misalignment error
α값을 계산하기 위해서 아래와 같은 관계식 (2~7)을 이용하여 출력할 수 있다. 아래의 식 (2)에서 밑첨자 x는 센서 좌표계의 진행방향 축 좌표, θme는 센서좌표계와 하우징좌표계 간 비정렬 오차, 식 (4)의 g는 중력 가속도를 의미한다. 식 (7)을 통해 α값은 fvms값을 활용하여 도출해낼 수 있음을 알 수 있다. 즉 VMS 센서융합을 통해 α값을 출력해 낼 수 있으며 계산된 α값을 제거함으로써 위치추정을 개선할 수 있다.
5. 위치추정 알고리즘 제안
5.1. 칼만 필터 개념 및 구조
칼만 필터는 기존의 측정 데이터와 새롭게 측정한 데이터를 기반으로 데이터에 포함된 노이즈를 제거하고 새로운 결과를 추정(Estimate)하는 데 사용하는 알고리즘이다[10,11]. 현대 전투에서는 디지털전장관리체계를 적용함에 따라 실시간 임무수행을 위한 기동물체의 정확한 위치추정을 위해 칼만 필터를 적용하고 있다. 전투차량은 지속적으로 위치를 추정하기 위해 칼만 필터를 활용한 정확한 상태정보(위치, 속도 등)를 실시간으로 보상하여 데이터의 오차를 최소화하고 있다. 위치추정에 영향을 미치는 외란 요소에는 전투차량의 구동에 따른 진동 오차, 데이터 전송에 따른 갱신 오차, 보조 센서와의 측정 오차 등이 포함된다[10]. 이러한 오차를 보상하기 위해서 단일 센서가 아닌 다중센서를 함께 사용한다[5].
일반적으로 기동이 작고 단순 직선운동만 하는 물체의 경우 단일 센서를 사용해 쉽게 위치를 추정할 수 있으나 실제 표적처럼 다양한 기동 특성을 갖는 표적을 감지하기 위해서 다중 센서를 함께 사용하는 것이 일반적이다[5]. 단일 센서를 사용할 경우 추정치의 오차가 커지거나 발산하기 때문에, 전투차량의 급격한 궤도 혹은 속도 변경 등과 같은 외란을 감안했을 때 다중 센서를 활용하는 것이 적합하다고 볼 수 있다.
5.2. 다중센서 융합
전투차량의 자세값을 계산하기 위해 INS를 이용하고 있으며 2장 1절에서 언급한 바와 같이 INS는 자이로와 가속도계가 각각 3축으로 장착되어 있다. 두 센서를 단독으로 사용하기에는 부정확한 자세를 측정하기 때문에 INS는 두 센서 모두를 활용해 자세정보를 얻는다. 자이로는 기동패턴을 정확히 감지할 수 있으나 시간이 지나면서 오차가 조금씩 누적되어 자세각이 편향되는 문제점을 가지고 있다. 반대로 가속도계는 오차가 발산하지 않고 일정 범위 안에 머물고 있지만 자세를 감지하는 과정에서 적분을 하지 않아 정밀도가 떨어진다. 이와 같이 두 센서의 출력을 결합하여 더 좋은 성능을 끌어내는 기술을 센서 융합(sensor fusion)이라고 한다[5,6]. 앞서 기술한 바와 같이 센서융합은 상이한 신호원으로부터 발생된 신호를 하나의 정보로 통합하는 방법으로서 다양한 센서로부터 수집된 정보를 칼만 필터로 처리한다.
다중센서의 융합은 각 센서에 할당된 부 필터가 독립적으로 처리한 후 주 필터에 다시 융합시키는 트랙간 융합(track to track fusion) 구조와 각 센서에서 획득한 측정치를 한 곳으로 집중시키는 측정치 융합(measurement fusion) 구조가 있다[5,6]. 트랙간 융합은 고장 탐지 및 분리가 쉬운 장점을 가지고 있다. 반면 측정치 융합은 모든 센서 데이터를 하나의 필터를 통해 처리하므로 많은 계산량이 필요하지만, 위치추정 성능은 트랙간 융합에 비해 우수하다[6]. 본 논문에서는 전투차량의 운용목적을 고려하여 정확한 위치추정을 위해 측정치 융합 구조를 활용한 다중센서 융합 알고리즘을 제안한다.
5.3. 알고리즘 설계
본 논문에서 설계할 다중센서 융합 알고리즘은 INS/GPS의 누적 오차를 VMS 센서융합을 통해 보정하는 것이다. Fig. 10은 VMS, INS, GPS의 센서융합 원리를 개념적으로 표현한 그림이며 VMS 형상 및 다중센서 융합 구성도는 Fig. 11과 같다.

Structure of the proposed algorithm
Configuration of multiple sensors
칼만 필터를 통해 다중센서 융합을 구현하기 위해서는 먼저 시스템 모델과 측정모델을 고려해야 하며 전투차량의 운동방정식을 표현해야 한다[6,11]. 아래의 식 (8), (9)는 전투차량의 상태방정식과 측정 모델의 출력방정식을 의미하며 각 축에 대한 차량의 위치는 운동방정식을 이용해 아래의 식 (10), (11), (12)와 같이 표현할 수 있다. 여기서 T는 샘플링 시간이며 ek는 시스템 모델링 오차를 의미한다. 상태변수
칼만 필터는 아래 1∼4와 같은 순서를 통해 추정값과 오차 공분산을 계산한다. 여기서 필터의 추정값과 오차 공분산은 각각
1. 상태변수의 추정값과 오차 공분산의 초기값(
2. Time Update(Predict) 단계는 추정값과 오차 공분산의 다음번 값을 예측한다. 예측한 k의 상태변수는
3. 정보량 분배를 위한 칼만 이득은 다음과 같은 조건을 만족한다.
4. Measurement Update(Correct) 단계는 예측값과 센서로부터 얻은 측정값을 통해 추정값
6. 알고리즘 성능 확인
VMS를 결합한 다중센서 융합 알고리즘의 항법 성능을 확인하기 위해 복합항법 시스템의 출력값과 비교한다. 제안 알고리즘의 성능을 평가하기 위해 본 논문의 5장에서 언급한 센서융합 알고리즘을 장입하고, 제 4장과 같이 전투차량에 탑재하여 운용적합성 평가를 수행한다. 평가 기준은 GPS 연동 후 단절 시험과 후진주행 시험에 대한 CEP50 및, PE50값으로 설정하였으며 전투차량에서의 실제 항법 성능을 확인하였다. Fig. 12의 왼쪽 그래프는 기존 복합항법 알고리즘을 적용했을 때 고도오차 결과로 관성센서에 의한 항법오차와 α값이 합쳐진 결과이며 Fig. 12의 오른쪽 그래프는 센서융합 알고리즘을 적용해 출력한 고도오차로서 α값의 오차가 제거하여 고도오차 범위가 줄어든 것을 확인할 수 있다. 3장에서 언급한 바와 같이 CEP50 및 PE50값은 1회 시험결과의 정확도를 의미하는 것이 아니며 전체 시험결과의 정확도와 정밀도가 중요한 요인이므로 Fig. 12를 통해 정확도와 정밀도가 향상되었음을 알 수 있다.
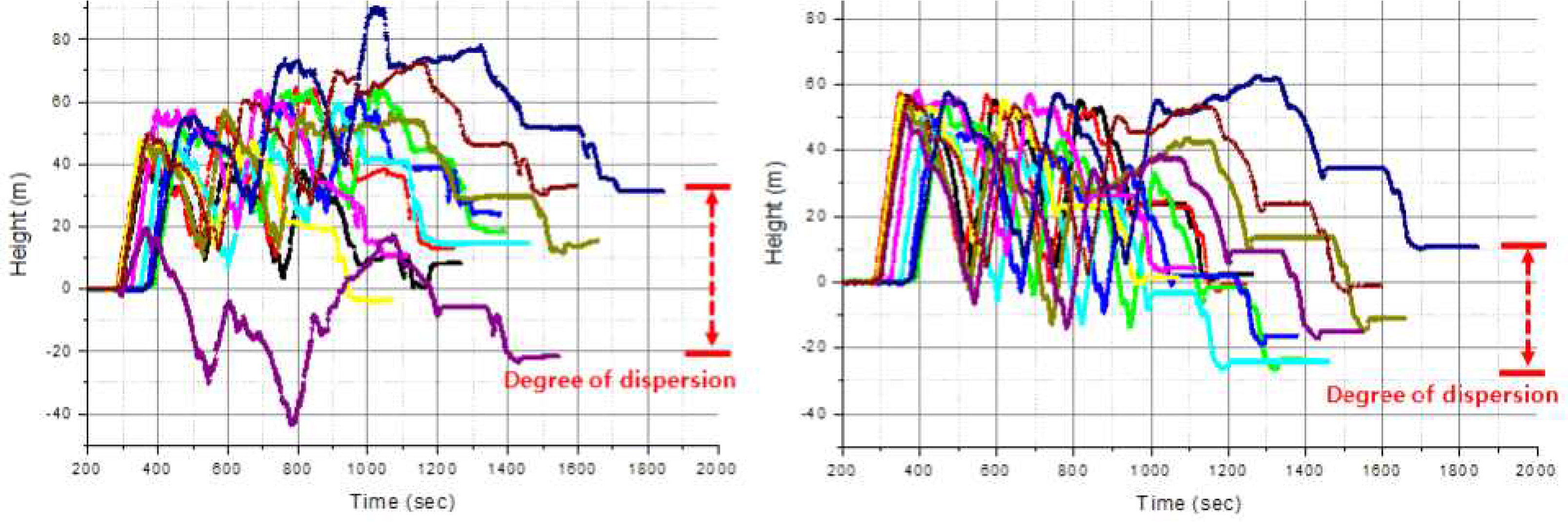
Test results of navigation performance
(Left : the hybrid navigation system, Right : sensor fusion method)
규격 요구조건을 충족하지 못한 GPS 연동 후 단절시험과 후진시험에 대한 운용적합성 시험결과는 Table 3, 4와 같다. GPS 연동 후 단절시험은 수평위치오차가 56%, 고도오차가 7% 개선되었다. 또한 후진주행 시험에서는 수평위치오차가 58%, 고도오차가 75% 개선됨을 확인하였다. 여기서 GPS 연동 후 단절시험의 고도오차 개선율과 비교하여 후진주행 시험의 고도오차 개선율이 상대적으로 높은 이유는 후진주행 시험의 경우 pitch오차가 크게 작용하였으며 다중센서 융합을 통해 α값을 추정하여 제거하였기 때문이다.

Comparison of navigation performance(GPS interlock-cutoff test)

Comparison of navigation performance(Backward driving test)
7. 결 론
전투차량에서는 INS를 주센서로 사용하고 GPS 등을 보조센서를 사용하는 복합항법을 구성하는 것이 일반적이다. 하지만 복합항법에 대한 운용적합성시험 결과 차량의 진행방향(x)으로 수평위치오차가 누적되며 VMS 센서 축과 하우징 축의 비정렬 오차 α각이 존재함에 따라 차량의 고도오차가 증가됨을 확인하였다.
따라서 본 논문에서는 다중 센서를 활용하여 입력값에 대한 상태변수를 통합하는 센서융합을 통해 개선된 위치추정 알고리즘을 제안하였다. 제안한 알고리즘의 성능을 평가하기 위해 복합항법 시스템과 비교시험을 진행하였으며 센서융합 시스템이 복합항법에 비해 위치추정 성능이 개선됨을 확인하였다. 또한 기준에 벗어났던 GPS 연동 후 단절시험과 후진주행시험에서 모두 규격요구조건이 충족됨에 따라 센서융합 시스템은 전투차량에 적용 가능할 것으로 판단된다.